Hi, I'm Alex.
designer
Working across physical AI, robotics, and spatial computing, rooted in real industrial deployments.
Sample work belowI lead robotics and Physical AI at Slalom in New York. I run small, hands-on teams of engineers, designers, and product people, figuring out how a new technology actually behaves in the world. Right now: autonomous mobile robots in active operations, and humanoids that learn in simulation before they touch a factory floor.
More about me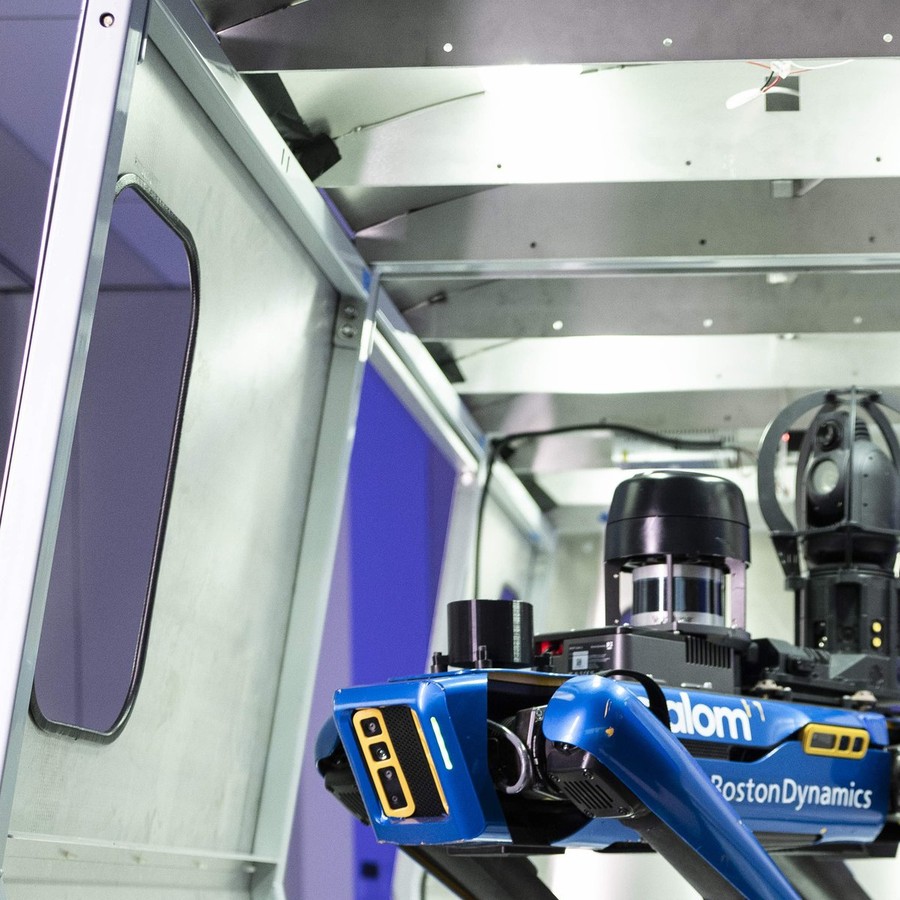
Field robotics R&D
Multi-year applied R&D for a global airline. Autonomous mobile robots that handle inspection in active outdoor operations, in conditions you'd rather not send people into. Wet weather, dense ground traffic, tight turnaround windows.
Read the case
Spot at the rail factory
A Boston Dynamics Spot quadruped, custom-rigged with a Slalom sensor + software stack on a private 5G network (with Ericsson), deployed across roughly a year inside an Industry 4.0 rail factory where everything but the roof columns moves on a regular cadence. Live 24/7 alongside humans and AGVs. Presented at India Mobile Congress and Mobile World Congress.
Read the caseHumanoid robotics pilot
Humanoid pilot for a Japanese industrial conglomerate. Whole-body locomanipulation trained in NVIDIA Isaac Lab, orchestrated via Google Gemini Robotics.
Read the case